The robots with me
RoboCup
I took part in the RoboCup China back in 2013. The competition we were in was the “standard platform game”. For “standard platform”, it means using the NAO robots to play football, or soccer if you prefer.
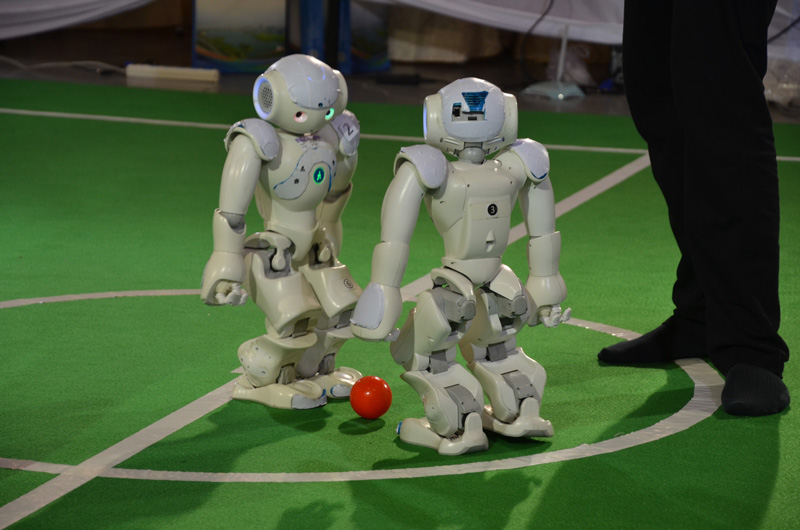
I was in charge of the code development of multi-robot communication. It was a two-day event and I remember that I hardly slept. It was so tired and yet, so funny.
- ↓ I was the guy in front of all our football players (the NAO robots) in case you can not find me.

Moving platform
In the winter of 2015, as a member of a small team of three people, we developed a moving platform.
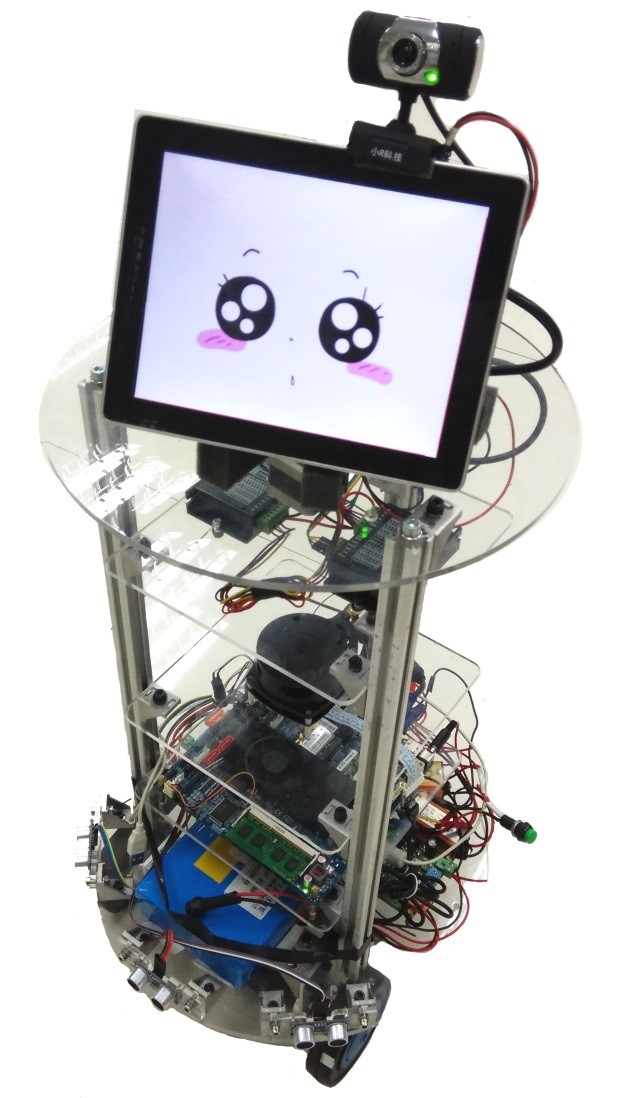
In this project, I was assigned to develop the software for all the low level hardware, including all the motors, the ultra-sound distance sensors, and the communication device (to be able to communicate with the higher level PC).
This little robot has two laser sensors and it could build the map of its surrounding environment and figure out where it is located. It has a camera and can perform real time face tracking.
But the most important feature is that it has a cute face with blinking eyes :)
AR.Drone

This quadrotor drone had amazing capabilities back to those days when quadrotors were not as popular as they are today. The most important feature of AR.Drone is that it was shipped with a set of SDK that let the user to get access to the hardware and develop applications.